














高度複雑信号で駆動する次世代システム制御理論の構築
大学院理工学研究科 工学専攻 機械工学プログラム/
工学部 先進工学科 機械工学プログラム 准教授 西村悠樹
活動の背景・目的
SDGsの達成に欠かせない近未来の姿である「ソサイエティ5.0」とは、サイバー空間(仮想空間)とフィジカル空間(現実空間)を高度に融合させた「サイバーフィジカルシステム」に基づく経済発展と社会的課題の解決を両立した社会のことである。サイバーフィジカルシステムを解析したりコントロールしたりするための基礎技術の一つが「システム制御」であり、理論と応用の両面から発展と開拓を行う必要がある。
活動の概要
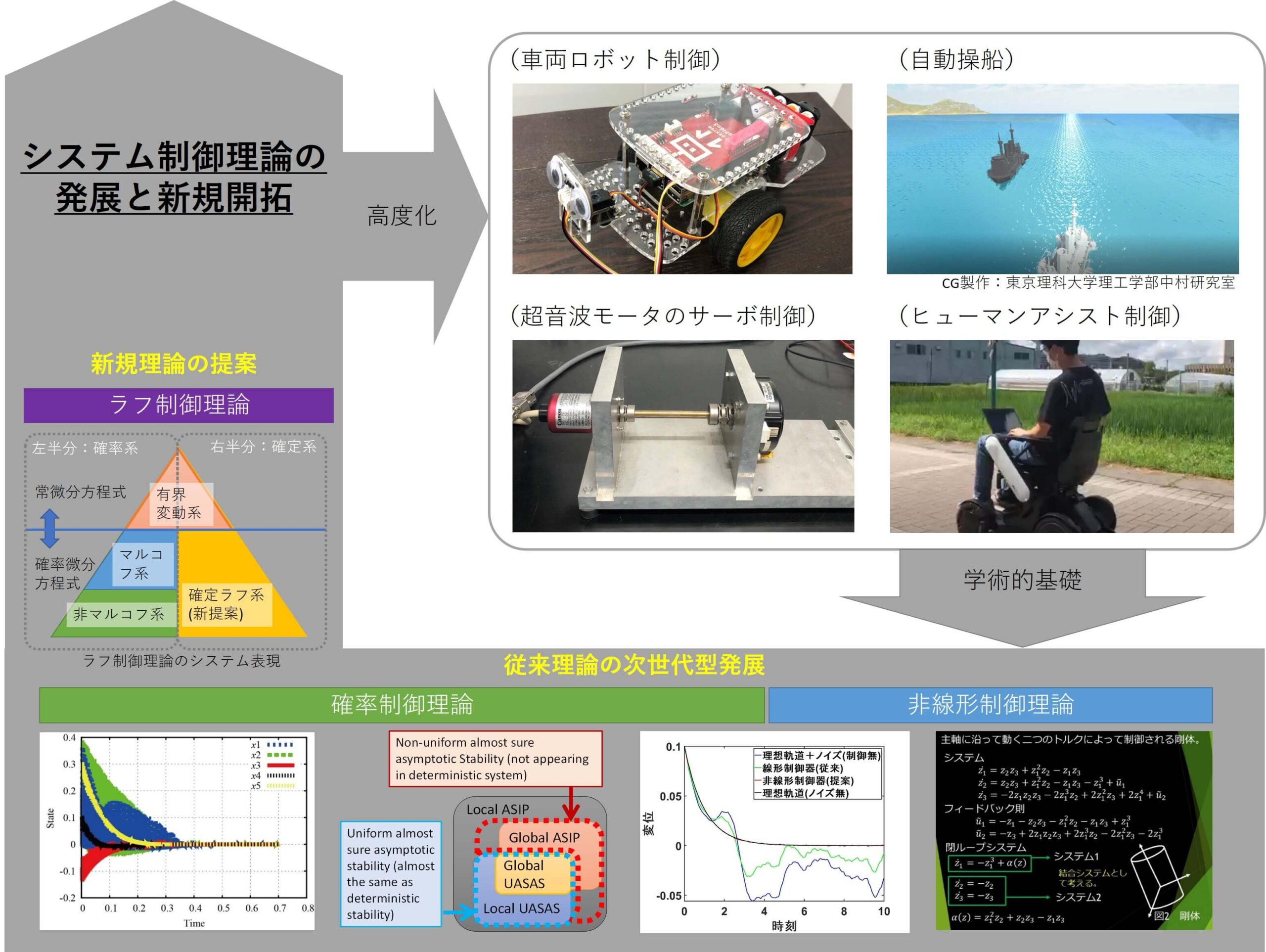
車両ロボットの制御・自動操船・モータ制御のような工業的基礎技術を向上させるだけでなく、人間が機械や電子機器を「安全に」思い通りに動かすための補助動作技術である「ヒューマンアシスト制御」の研究も行っている。また、それら実学的な応用を直接扱いながらも、システム制御理論そのものの発展と新規開拓も精力的に進める。特色としては、実在のシステムの多くに含まれる「非線形性」や「不規則性」などの複雑な性質を、高度複雑信号と捉えて解析と制御が行えるような理論の創出を目指している。
期待される効果
取り組んでいる応用課題は「目標9 産業と技術革新の基盤をつくろう」「目標4 質の高い教育をみんなに」「目標11 住み続けられるまちづくりを」の発展を導く。そして、ヒューマンアシスト制御は福祉にも関わることから、「目標3 すべての人に健康と福祉を」への貢献も見込まれる。